Vertical Articulated Robot TVL700

Overview
Cost-effective performance

It provides a vertical articulated robot arm length 700mm with Cost-effective performance.
Special features
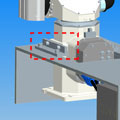
Tap holes
Tool fixture tap holes are provided at four locations on the arm, upper and lower positions.
They are useful for fixing external cabling and peripheral devices.
1st arm equipped with a T-groove as standard
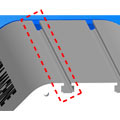
The T-groove can be used to place tools, cabling and DIN rails in position.
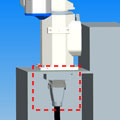
Alternative installations
Tap holes on the side of the base unit allow for the robot to be installed sideways.
Variety of options
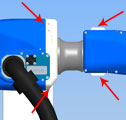
Robot controller cable options
In addition to the standard cabling at the back, cabling can be routed through the base.
This eliminates the need for installation space at the rear, and increases flexibility relating to the application and the space available.
I/O panel options
The I/O panel can be selected from three options.
An optional elbow type plug is available on the hand-side connection. (Option)

IP65 option
Dust-proof and drip-proof protection is available if required.
Compact controller

Controller TSL3100 specifically designed for the vertical articulated robot.
Specifications
| Model | TVL700 | |
|---|---|---|
| Arm length | Total | 700 mm |
| 1st arm | 400 mm | |
| 2nd arm | 300 mm | |
| Reach | 801mm | |
| Working envelope | Axis 1 | ±170 deg |
| Axis 2 | -90 ∼ +165 deg | |
| Axis 3 | 0 ∼ +165 deg | |
| Axis 4 | ±190 deg | |
| Axis 5 | ±120 deg | |
| Axis 6 | ±360 deg | |
| Maximum speed | Axis 1 | 295 deg/s |
| Axis 2 | 270 deg/s | |
| Axis 3 | 295 deg/s | |
| Axis 4 | 422 deg/s | |
| Axis 5 | 422 deg/s | |
| Axis 6 | 696 deg/s | |
| Composite | 7.71 m/s | |
| Standard cycle time *1 | 0.4 s level | |
| Maximum Load Mass | 4 kg(rated: 1 kg) (Downward: 5 kg) |
|
| Allowable moment of inertia *2 |
Axis 4 | 0.15 kg·m2 |
| Axis 5 | 0.15 kg·m2 | |
| Axis 6 | 0.2 kg·m2 | |
| Positioning repeatability *3 | X-Y-Z | ±0.03 mm |
| Hand wiring *4 | 4 inputs and 4 outputs | |
| Hand pneumatic joint *5 | φ4×4 pieces | |
| Robot controller cable | 3.5 m | |
| Power supply | 1.5 kVA | |
| Mass | 31 kg | |
| Controller |
|
|
*1: Continuous operation of standard cycle motion pattern is not possible beyond the effective load ratio.
(Horizontal 300 mm, vertical 25mm, round-trip, coarse positioning)
*2: Speed and acceleration rates are limited depending on motion patterns, load mass and load offset values.
*3: Positioning repeatable accuracy in one-direction movement, when the environmental temperature and robot temperature are constant.
It is not the absolute positioning accuracy.
The specification value may be exceeded depending on moving pattern, load mass and offset amount. Trajectory accuracy is not
guaranteed.
*4: Hand wiring cable can be offered (additional option). Please contact us for more details.
*5: Pneumatic joints for hand are provided on the base. Pipes are to be provided by the customer.