【RIDRS-Hヒト型双腕協働ロボット】
概要
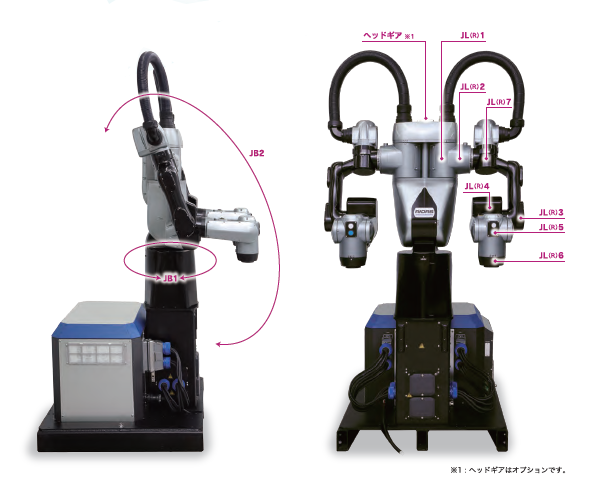
軸構成は、片腕7軸ずつ、腰2軸で合計16軸です。片腕7軸であるため、把持している製品の持ち替え、方向転換等が可能です。
腰軸(おじぎ動作)があるために、さらに動作範囲を広くとることができ、両腕で把持したまま振り返り作業が可能で、人作業をそのまま置き換えられます。
特徴
腰の第2軸(JB2)により長いリーチとフトコロへのアクセスが可能に!

・背を反らした姿勢で頭上より高い位置へのアクセスが可能になります。(※1)
・腰を曲げることで最大リーチを伸ばすことができます。
・短いアーム長でも腰を曲げることにより、フトコロへのアクセスが可能になります。
・協働モードの速度制限下でも、最短の移動距離のモーションでアクセスが可能と
なるため、サイクルタイムを上げることができます。
※1 :非協働モードでの動作になります。
各腕の第7軸(脇の開閉軸)により狭いスペースでの衝突を回避!

・脇を開閉することで腕を伸縮時に肘が周囲に衝突する事を回避することができます。
・設置スペースや動作時の逃げスペースが十分に確保できない状況下で役立ちます。
・従来の6軸構造ロボットは実現できなかった更に自由度の高い動きができます。
洗練されたデザインで人との協働作業を可能に!
・腰軸が動作することで人に近い動きを再現できます。
・挟まれが起きにくい関節形状で、人との協働作業を可能にします。
・第54回機械工業デザイン賞IDEA 審査員特別賞を受賞しました。
仕様表
| アーム長 | 全長 | 750(150+300+300) mm | |
|---|---|---|---|
| 総質量 | 279 kg 注1 | ||
| 電源容量 | 2.0 kVA | ||
| 可搬質量 | 片腕 | 6 kg 注2 | |
| 両腕 | 10 kg 注2 | ||
| 動作範囲 | JB1 | ±170 deg | |
| JB2 | -60~+30 deg | ||
| JL(R)1 | -90~+75 deg | ||
| JL(R)2 | ±120 deg | ||
| JL(R)7 | ±90 deg | ||
| JL(R)3 | ±120 deg | ||
| JL(R)4 | ±170 deg | ||
| JL(R)5 | -120~+100 deg | ||
| JL(R)6 | ±180 deg | ||
| 最大速度 注3 | JB1 | 80 deg/s | |
| JB2 | 80 deg/s | ||
| JL(R)1 | 180 deg/s | ||
| JL(R)2 | 180 deg/s | ||
| JL(R)7 | 180 deg/s | ||
| JL(R)3 | 180 deg/s | ||
| JL(R)4 | 180 deg/s | ||
| JL(R)5 | 180 deg/s | ||
| JL(R)6 | 220 deg/s | ||
注1):ロボット本体、コントローラ、架台の合計の質量となります。
注2):片腕づつで搬送する場合でも、ロボットが把持する質量の合計は10kg以下である必要があります。
注3):協働モードでの最大速度は下がります。
注記:本ページの内容はお断りなしに変更することがありますのでご承知おきください。