【RIDRS-Sスカラ型双腕協働ロボット】
- カタログダウンロードページはこちら
概要
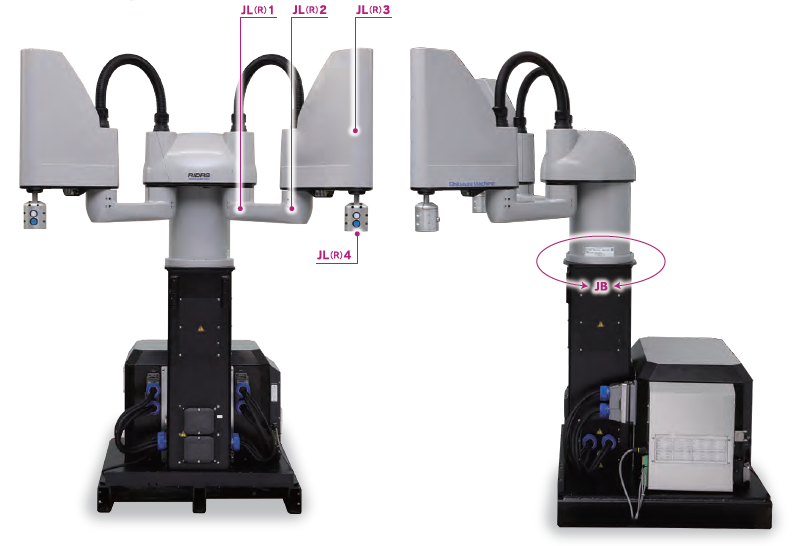
軸構成は、片腕4軸ずつ、腰1軸で合計9軸です。
従来のスカラロボットの動作に加えて、両腕を使用した、組み立て・搬送ができます。
スカラ型は、操作がしやすく、垂直力に対する剛性が高いため、製造現場に多く見られる鉛直方向作業、水平方向搬送などの人作業を置き換えられます。
特徴
ロボットに2本の腕を持たせることでシンプルで高速な動作かつ高剛性に!
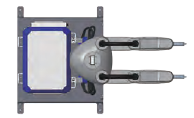
・2本の腕のベース部を共通にすることで、最小スペースでの配置が可能になります

・1台のロボットを設置するだけで、並んだ2つのワークを把持する動作や、1つのワークを両腕で同時に持ち上げる動作、持ち上げたままロボットの向きを反転して反対側に搬送する動作ができます。
・スカラロボットの特徴を活かしてシンプルで高速、高精度な動きを維持しながらも、両腕を使うことで高剛性をも同時に実現します。
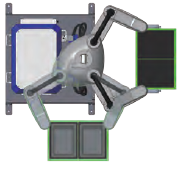
・スカラロボットを2台並べただけでは実現出来ない、ものを2本の腕で把持した状態での反転動作は、サイズの大きなワークの搬送に適しています。
仕様表
| アーム長 | 全長 | 750(150+300+300) mm | |
|---|---|---|---|
| 総質量 | 257 kg 注1 | ||
| 電源容量 | 2.0 kVA | ||
| 可搬質量 | 片腕 | 6 kg 注2 | |
| 両腕 | 10 kg 注2 | ||
| 動作範囲 | JB1 | ±164 deg | |
| JL1 | -40~+140 deg | ||
| JL2 | -140~+50 deg | ||
| JL3 | 0~290 mm | ||
| JL4 | ±360 deg | ||
| JR1 | -140~+40 deg | ||
| JR2 | -50~+140 deg | ||
| JR3 | 0~290 mm | ||
| JR4 | ±360 deg | ||
| 最大速度 注3 | JB1 | 187.5 deg/s | |
| JL1 | 300 deg/s | ||
| JL2 | 300 deg/s | ||
| JL3 | 1,500 mm/s | ||
| JL4 | 1,500 deg/s | ||
| JR1 | 300 deg/s | ||
| JR2 | 300 deg/s | ||
| JR3 | 1,500 mm/s | ||
| JR4 | 1,500 deg/s | ||
注1):ロボット本体、コントローラ、架台の合計の質量となります。
注2):片腕ずつで搬送する場合でも、ロボットが把持できる質量の合計は10kg以下です。
注3):協働モードでの最大速度は下がります。
注記:本ページの内容はお断りなしに変更することがありますのでご承知おきください。