双腕協働ロボットRIDRSシリーズ 製品一覧
- カタログダウンロードページはこちら
【RIDRS-H(ヒト型双腕協働ロボット)】
16軸駆動で人に近い動きを再現

- 詳細はこちら
【RIDRS-S(スカラ型双腕協働ロボット)】
シンプルかつ高速な動きに高剛性を追加

- 詳細はこちら
導入事例
プログラミング・シミュレーション
ビジュアルプログラミング(Blockly)
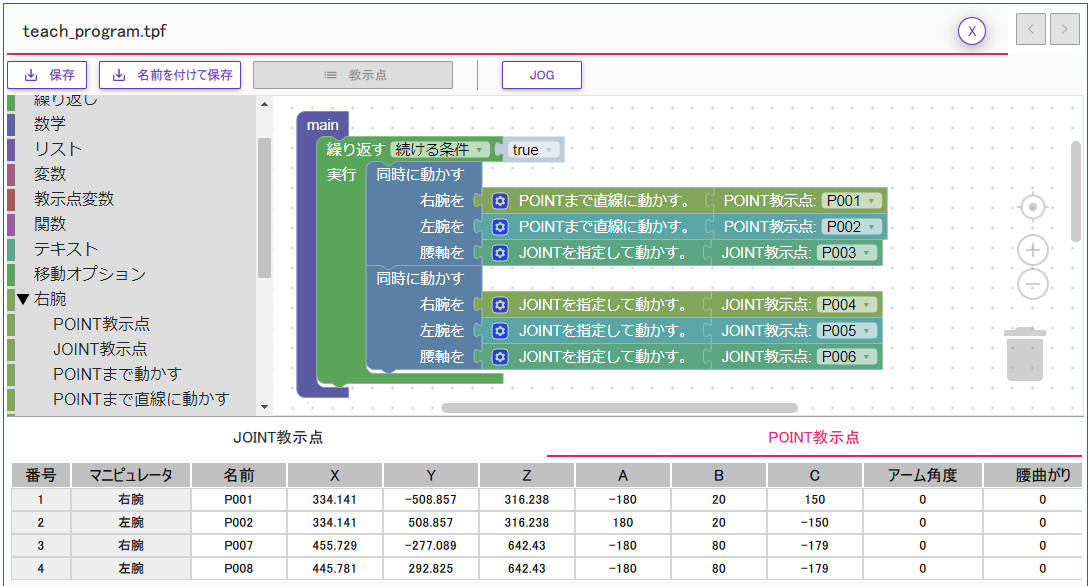
ロボットプログラミングに馴染みがなくてもビジュアルプログラミングで直感的に構造を理解することができます。
また、構造的に誤ったプログラムは構築されない仕組みを導入しているため、専門知識がなくてもプログラムを学習していくことが可能です。
上級者向けプログラミング言語(Python)
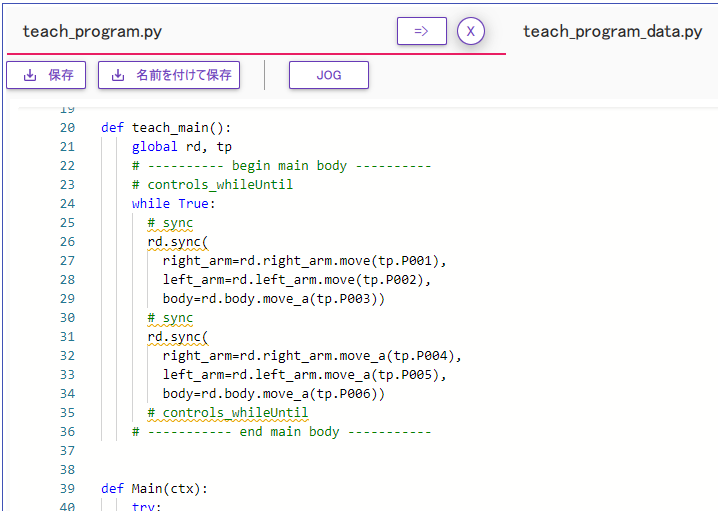
ロボットプログラム言語としてPython3を採用しました。
Blocklyで作成したプログラムをPythonに変換可能です。
Python用に用意しました当社ロボット専用の関数群を使用して、より複雑な制御を行うことができます。
例えば、座標テーブルの座標値を加減算して書き換える関数を使って、パレタイズプログラムを生成することが可能です。
ロボットシミュレーション(ROBOAssist)
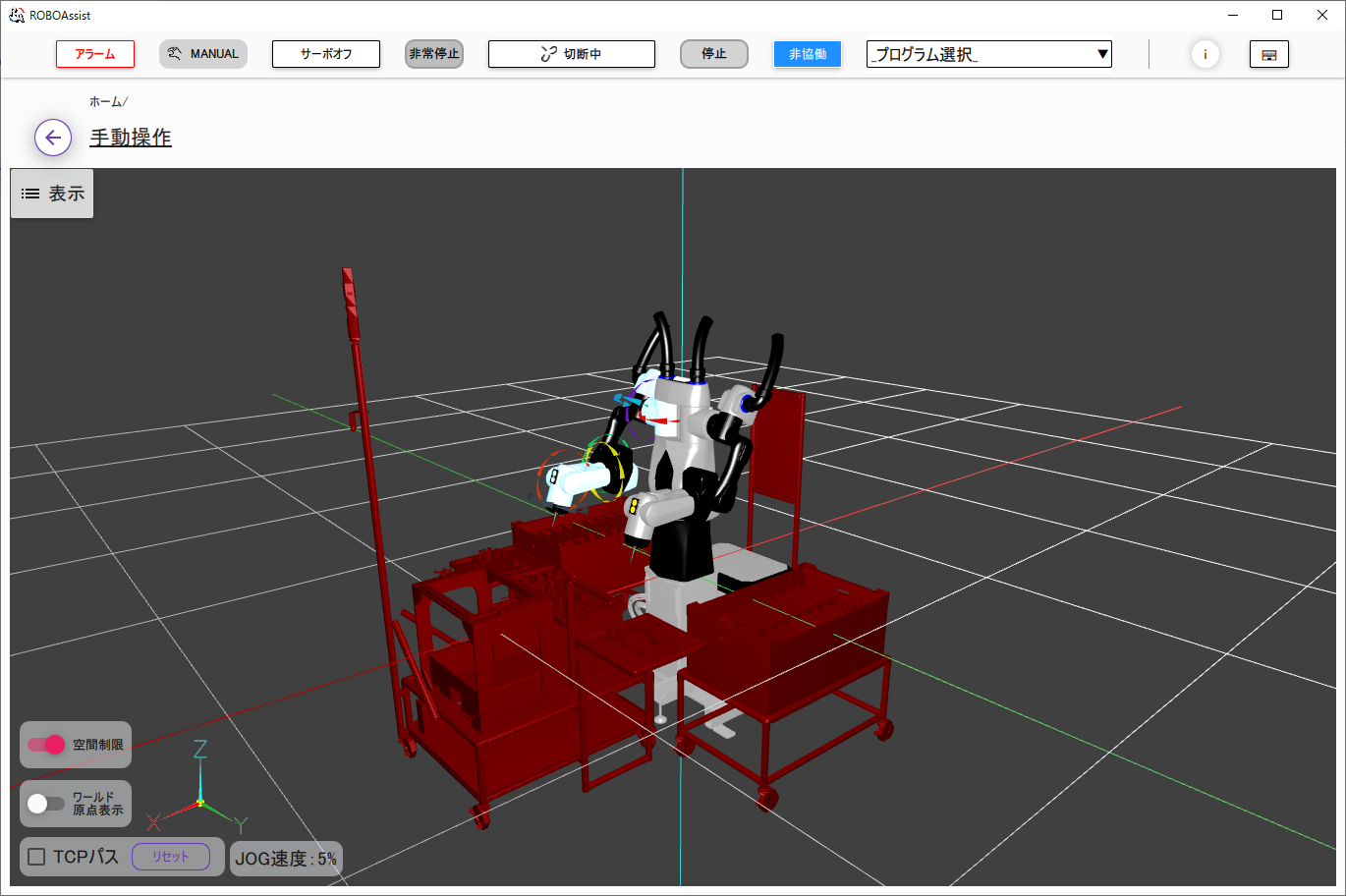
ロボットモーションやレイアウトは3D表示で確認できます。
レイアウトに表示するロボット周辺の3Dモデルは、お客様ご自身で自由にデータ取込、表示位置設定することができます。
また、セルフモーション動作では、ロボットの手先の位置を変えずに肘の姿勢を変えることができます。
ロボット周辺の物との干渉や、ロボットの特異点を回避する姿勢を容易に教示することができます。
教示装置(RIDRS-TP)
教示装置RIDRS-TPは、オプションのセーフティコマンダ™にタブレットPCを装着し、コントローラに接続します。

専用アプリケーションソフト「ROBO Assist」は、オフライン状態での3Dシミュレータ機能と
オンライン状態でのティーチペンダント機能を同一ソフトで実現し、シームレスに移行することが可能です。
協働ロボット導入の利点と注意点
協働ロボットの主な特徴と活用利点
人と協働(省スペース)
協働運転では必要最小限の安全柵のみとなり、設置面積を縮小することが可能です。既設の人手による製造
ラインを少ないレイアウト変更で自動化できます。
協働運転のための安全機能
市販のエリアセンサを接続して、センサ内に人が侵入すると安全入力監視機能により速度を落として協働運転モードに切り換わります。
安全制限位置機能により、ロボットの動作範囲を制限し、衝突のリスクを低減することができます。
人との衝突を検知すると、安全トルク停止機能により停止します。
安全関連部故障診断機能により、二重回路のクロスチェックで安全関連部の故障が生じた際は安全に運転を停止します。
治具レス(両腕作業)
単腕では製品ごとにワーク固定治具や反転治具が必要なことが多いですが、双腕であれば、片腕で製品を押さえながら、もう片方の腕で別の作業(組み立て、ねじ締めなど)をすることができ、専用治具が不要になります。
容易に移設可能
設置は必要最小限の安全冊と固定(アンカー固定推奨)であるため、架台ベース部の下層に設けたスペースを活用してハンドリフトで容易に移設できます。
適合規格
ISO 10218-1
ISO/TS 15066
使用上の注意
●本製品は協働ロボットではありますが、実際にお客様が使用されるシステムに組み込まれた場合、
無条件に人への傷害を発生させないことを保証するものではありません。
協働作業の実施にあたっては、事前に十分にリスクアセスメントを実施し、リスク低減方策の
妥当性確認が必要です。
●ヒト型ロボットの協働運転には、緊急時脱出用のブレーキ解放ユニットが必要です。
●MANUALモード、SETUPモードの操作にはオプションのセーフティコマンダ™とタブレットPCが必要です。
コントローラ仕様
| 項目 | 説明 | ||
|---|---|---|---|
| コントローラ形式 | RIDRS-HC | RIDRS-SC | |
| 対応ロボット形式 | RIDRS-H(ヒト型) | RIDRS-S(スカラ型) | |
| 制御軸数 | 16軸 | 9軸 | |
| プログラム保存容量 | 1Gbyte(最大512ファイル、1ファイル最大2Mbyte) | ||
| 補助メモリ | SDカード(SDXC:Max 2TByte) | ||
| 制御方式 | ティーチング・プレイバック方式(プログラミング言語:Python、補助ツール:Blockly) | ||
| 入出力信号 | 汎用 | 入力:4点 出力:8点(オプションでIO増設可能) | |
| システム | 入力:12点 |
サーボ起動(SVON)、サーボ停止(/SVOFF)
プログラム運転(RUN)、プログラム停止(/STOP) 即時停止入力(/BREAK)、プログラムリセット(PRG_Reset) アラームリセット(ALM_Reset) オーバライド設定入力(段階調整 5点) |
|
| 出力:5点 |
運転準備完了(SYS_Ready)、サーボ電源準備完了(SV_Ready)
アラーム(ALARM)、バッテリアラーム(BT_ALARM) 運転中(RUN) |
||
| ハンド | ヒト型(各腕) 入力:6点(ペイロード選択入力4点を含む) ハンドファンクションボタン入力:2点 出力:6点 |
スカラ型(各腕) |
|
| 安全回路 | 入力 : 非常停止入力、安全扉入力、ペイロード選択入力(各腕)、 安全入力(エリアセンサ or ライトカーテン) |
||
| 出力(チェックパルス出力機能付):STO出力、モード出力、SOS出力 | |||
| PLC機能 | 専用PLC内蔵(ロボットプログラムとは独立制御) | ||
| 通信機能 | Ethernet : 1ch(1Gbps) | ||
| マスターモード切替 | MANUAL / AUTO / SETUP(付属のモードボックスのキーで切替え) | ||
| 協働/非協働切替 | 安全入力により協働モード、非協働モード切替え | ||
| 教示装置 (ティーチペンダント) |
RIDRS-TP(市販タブレットPCとセーフティコマンダTM)注1
|
||
| 安全機能 | 停止機能 | 安全トルク停止、安全停止(停止後動力遮断あり/なし) | |
| 監視機能 |
安全運転停止、安全制限速度、安全制限トルク(トルクセンサ/モータ電流)、 |
||
| その他 | 安全出力機能、安全関連部故障診断機能 | ||
| 外形寸法 | 672(W)×461(H)×551(D)mm | ||
| 質量 | 36 kg | 32 kg | |
| 電源 | 主電源:単相 AC190 V~240 V 50/60 Hz | ||
| 入出力信号用電源:DC24 V | |||
| コントローラオプション | ・ セーフティコマンダ™(MANUALモード、SETUPモードの操作に必要です)※1 ・ IO増設 (入力16点、出力16点) ・ FIELDBUS 注2 (EtherNet/IP、PROFINET、EtherCATのいずれか) ・ コントローラ分離( キャスター取付、固定ブラケット取付のいずれか) |
||
注1):セーフティコマンダ™はIDEC社の登録商標です。当社オプションには専用接続ケーブルが付属します。
注2):EtherNet/IPはODVAの登録商標です。
PROFINETはPROFIBUS User Organizationの登録商標です。
EtherCAT®はドイツBeckoff Automation GmbHによりライセンスされた特許取得済技術であり登録商標です。
注記:本ページの内容はお断りなしに変更することがありますのでご承知おきください。
動画
- カタログダウンロードページはこちら