工場の自動化で人手不足の解消に貢献!
工場内での作業の自動化事例をご紹介します。
-
適用事例が無料で確認できる!資料ダウンロードページはこちら
適用事例一覧(成形機、加工機の前後工程例)
再生マーク があるものは動画も紹介しています。
があるものは動画も紹介しています。
適用事例の詳細
射出成形前後工程の搬送自動化
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
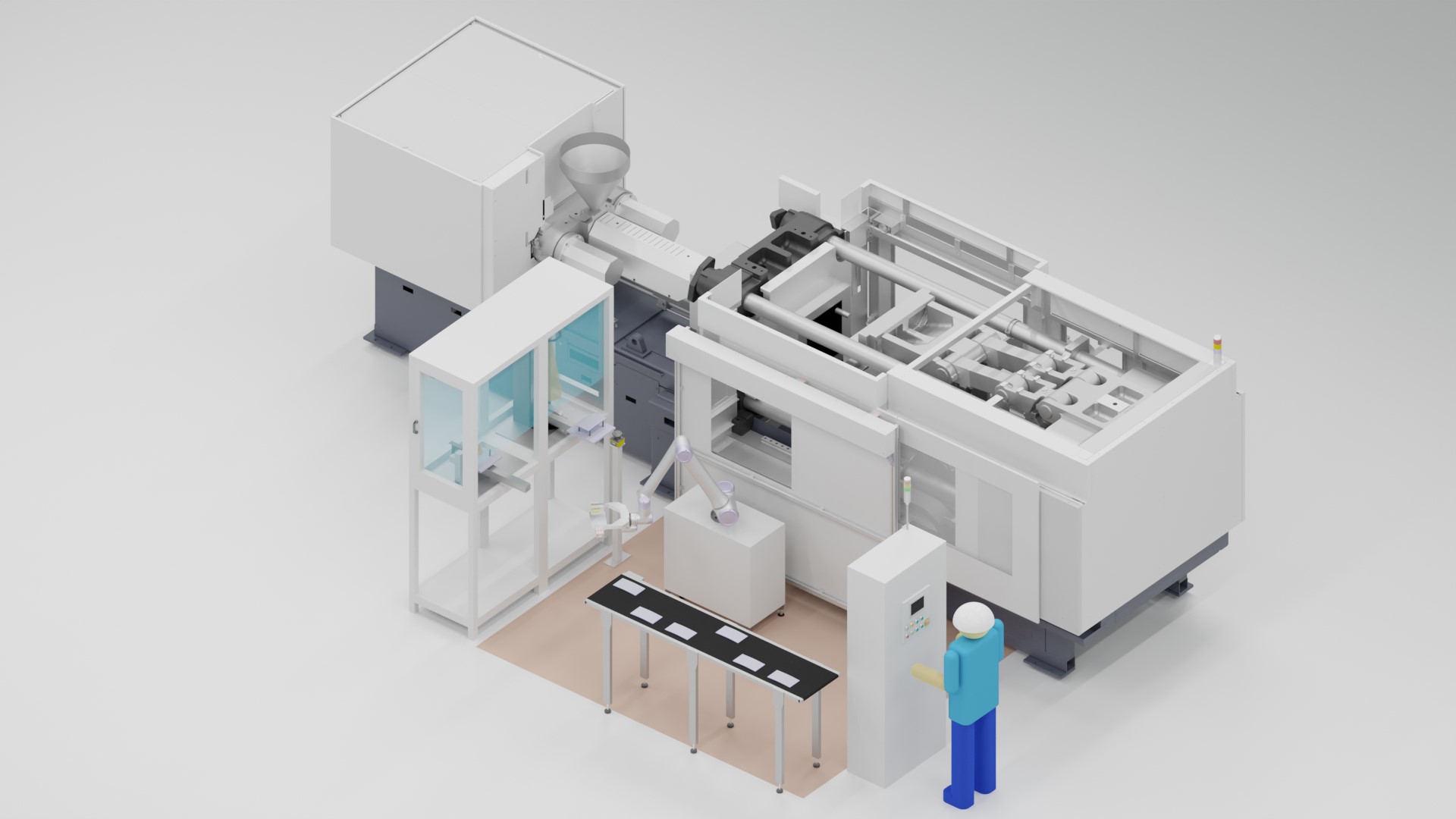
概要
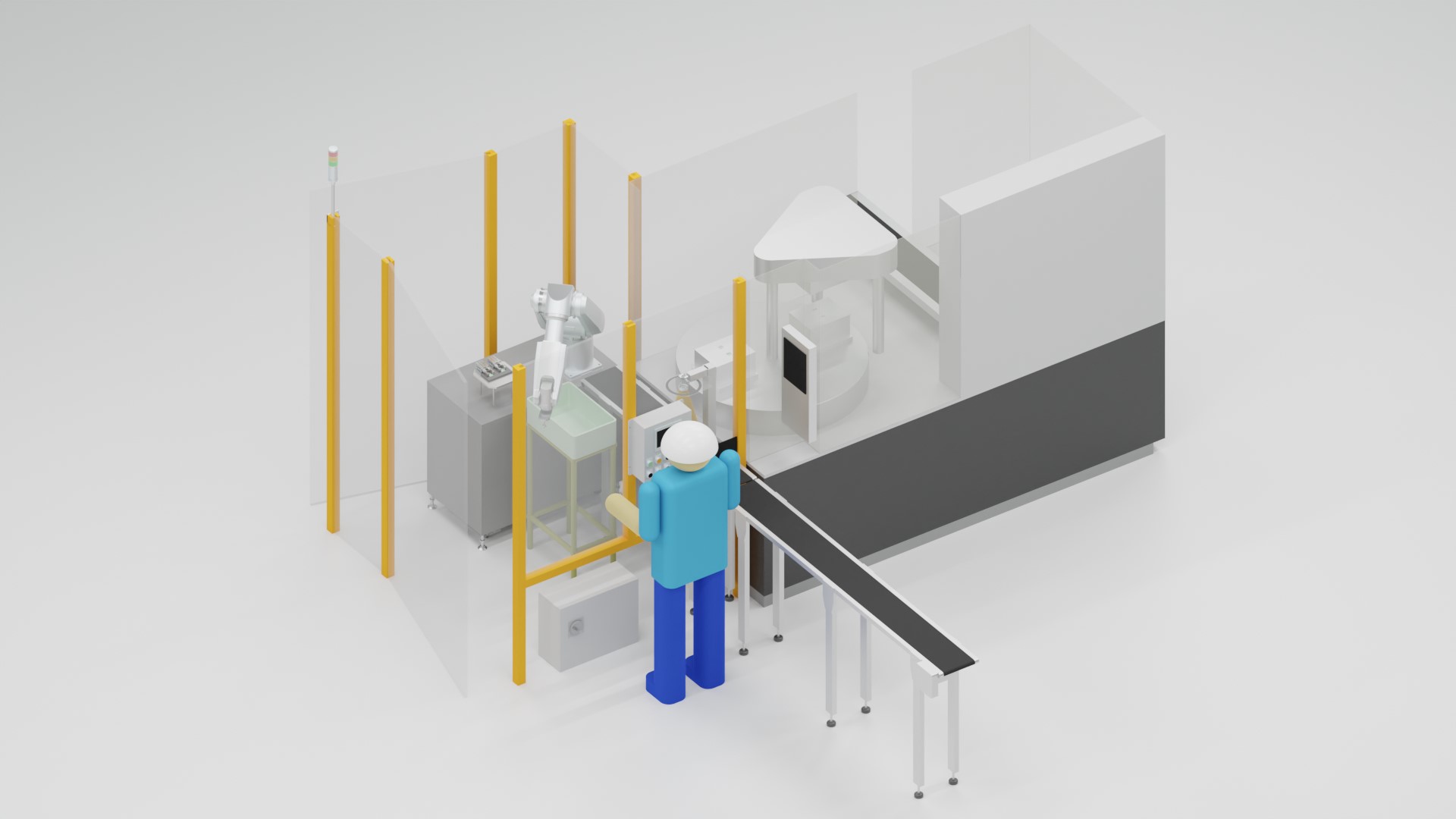
- 隣の装置からコンベアで流れてきた部品を多関節ロボットが画像認識して取り出し、金型にインサートします。
- 個人差による作業時間のばらつきがなくなり、成形品の品質が安定。
動作フロー
- コンベア上の部品を画像認識
- 多関節ロボットが部品を把持
- 位置決め
- 金型にインサート
- 製品取り出し
インサート成形(竪型射出成形機)
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
概要
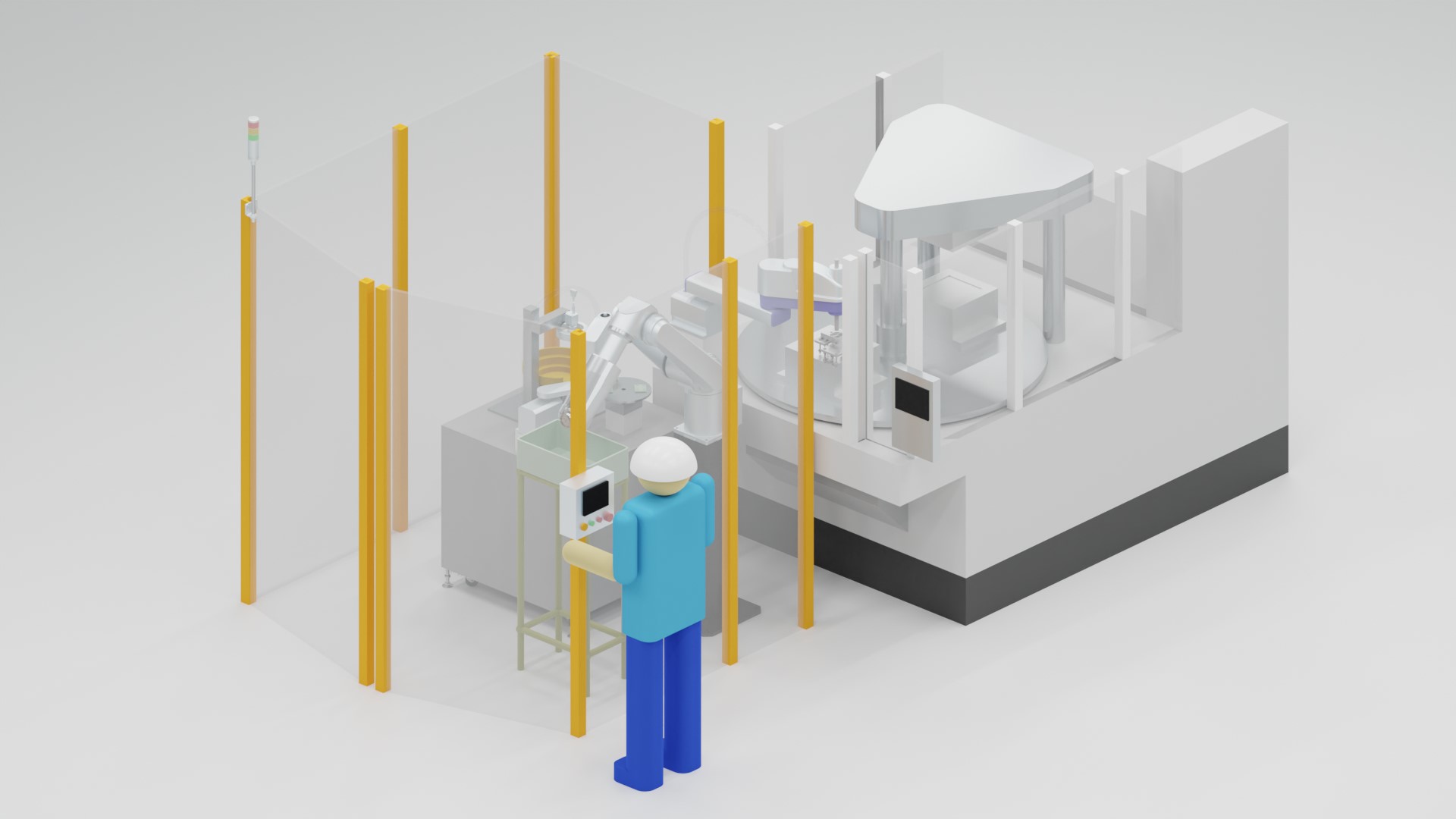
- 金型へのインサート部品のセットと製品取り出しを自動化します。
- 作業者の確保が難しいインサート成形を自動化します。
動作フロー
- パーツフィーダで部品を整列供給
- スカラロボット1が部品整列
- スカラロボット2にて受け取り、金型にインサートと製品取り出し
- 製品排出
インサート成形(横型射出成形機)
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
概要
- 金型へのインサート部品のセットと製品取り出しを自動化します。
- 個人差による作業時間のばらつきがなくなり、成形品の品質が安定します。
動作フロー
- パーツフィーダで部品を整列供給
- スカラロボットが部品整列
- 多関節ロボットにて受け取り、金型にインサートと製品取り出し
- コンベアへ製品排出
3Dピッキング
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
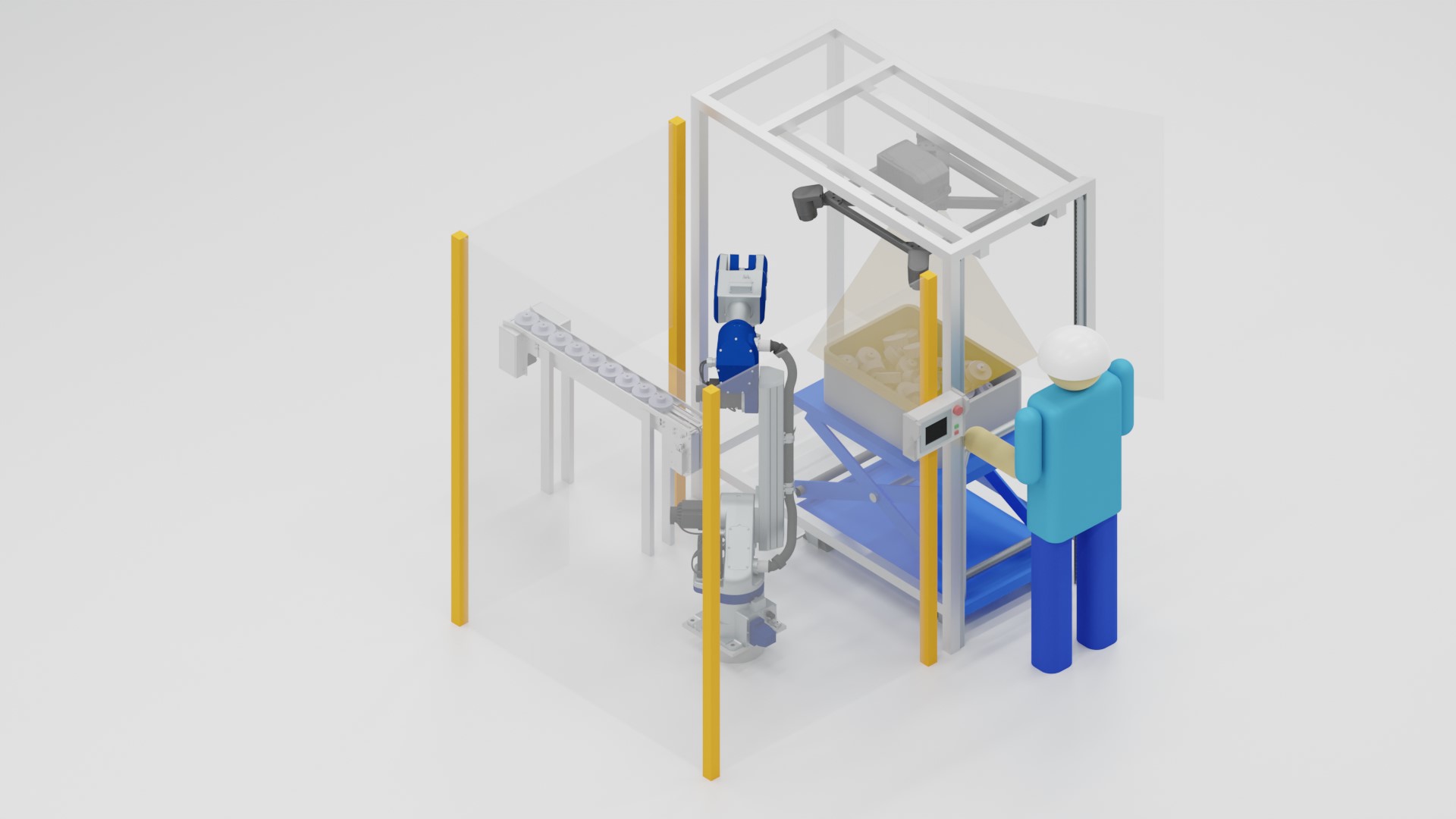
概要
- バラ積みワークを3Dカメラにて画像認識し、多関節ロボットがピッキングします。
- 作業者は製品箱の交換のみ行います。
動作フロー
- 作業者が製品箱をカメラ下にセット
- 画像認識
- 多関節ロボットがワークをピック
- 次工程に搬送
成形品前後工程の組立・搬送の自動化
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
概要
- フタとケースなどのセット取りした成形品の2次加工工程において装置間搬送を自動化します。
- 2人作業を1名に省人化します。
動作フロー
- 作業者によるワーク供給
- 金具の圧入
- 2部品の振動溶着
- 気密検査
- 作業者によるワークの取り出し
検査工程の自動化
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
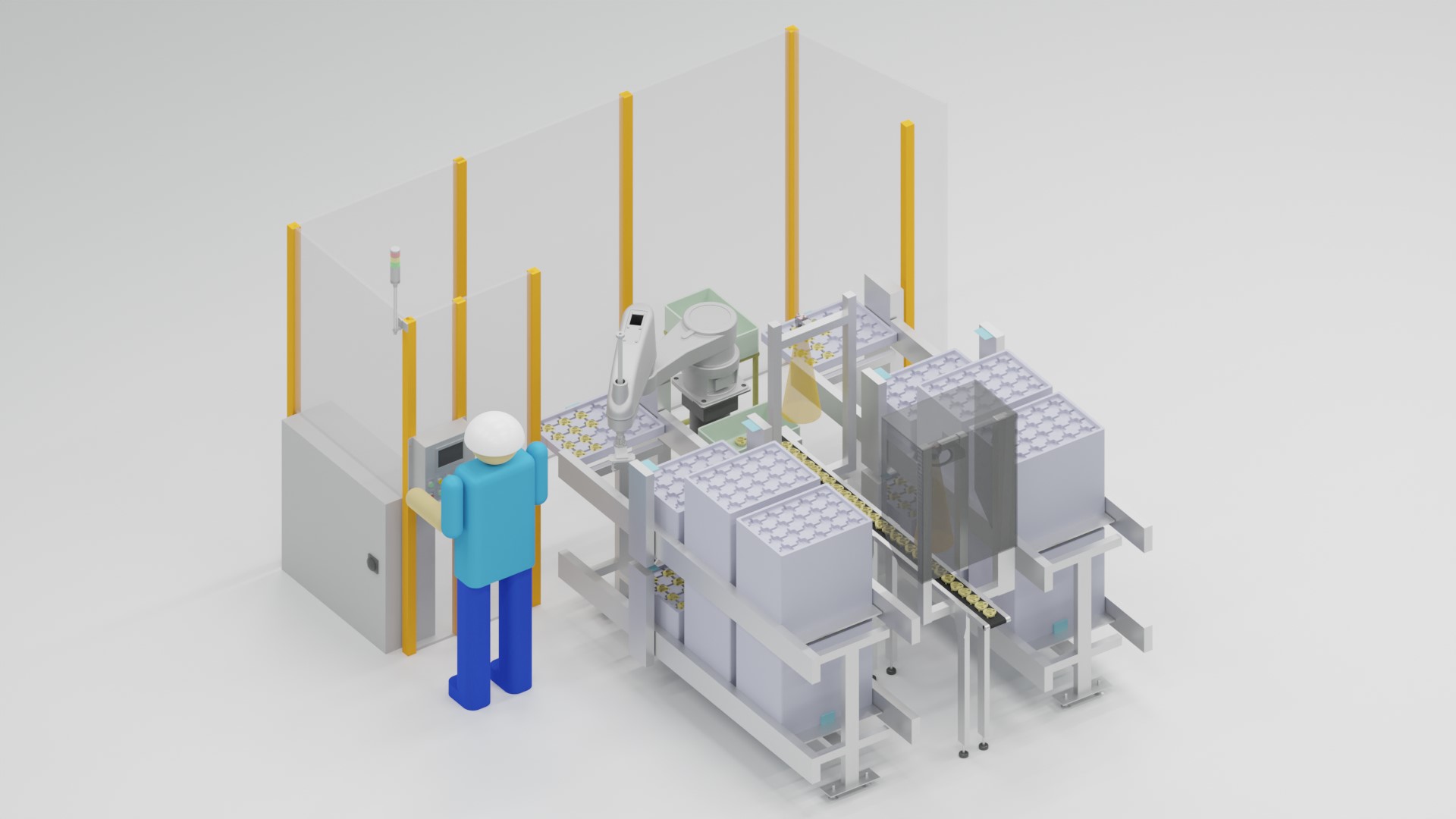
概要
- 成形品の検査工程において装置間搬送を自動化します。
- 協働ロボットの採用により人との共存が可能です。(安全柵不要)
- 検査装置を設置
動作フロー
- 成形品取り出し
- 検査装置にワークを搬送
- 装置内で自動検査
- 排出コンベアにワークを排出
ロジロボSP
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
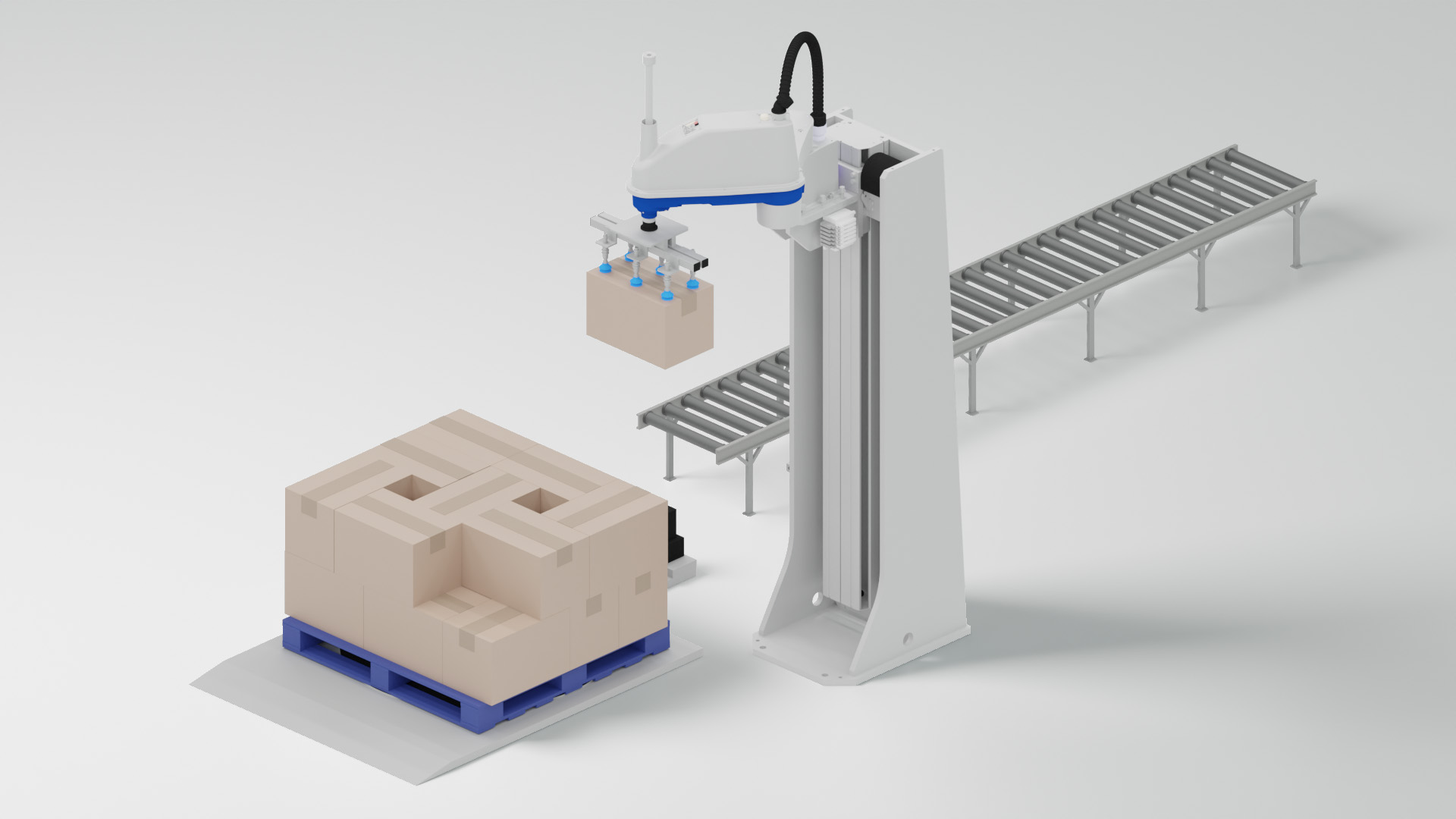
概要
- 段ボールの物流パレットへの高速パレタイズが行えます。
- スカラロボット+薄型回転台の組み合わせにより、スペース制限がある出荷ラインにも最適です。
- 2パレットやビジョンシステムを使用した混載・バラ積みにも対応可能です。
動作フロー
- コンベアから段ボールを受け取り
- パレットへ積み置き
- 薄型回転台が90°回転
- パレタイズロボットの可動範囲に積み付け→90°回転→積み付けの繰り返し
動画
ロジロボTC/FC
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
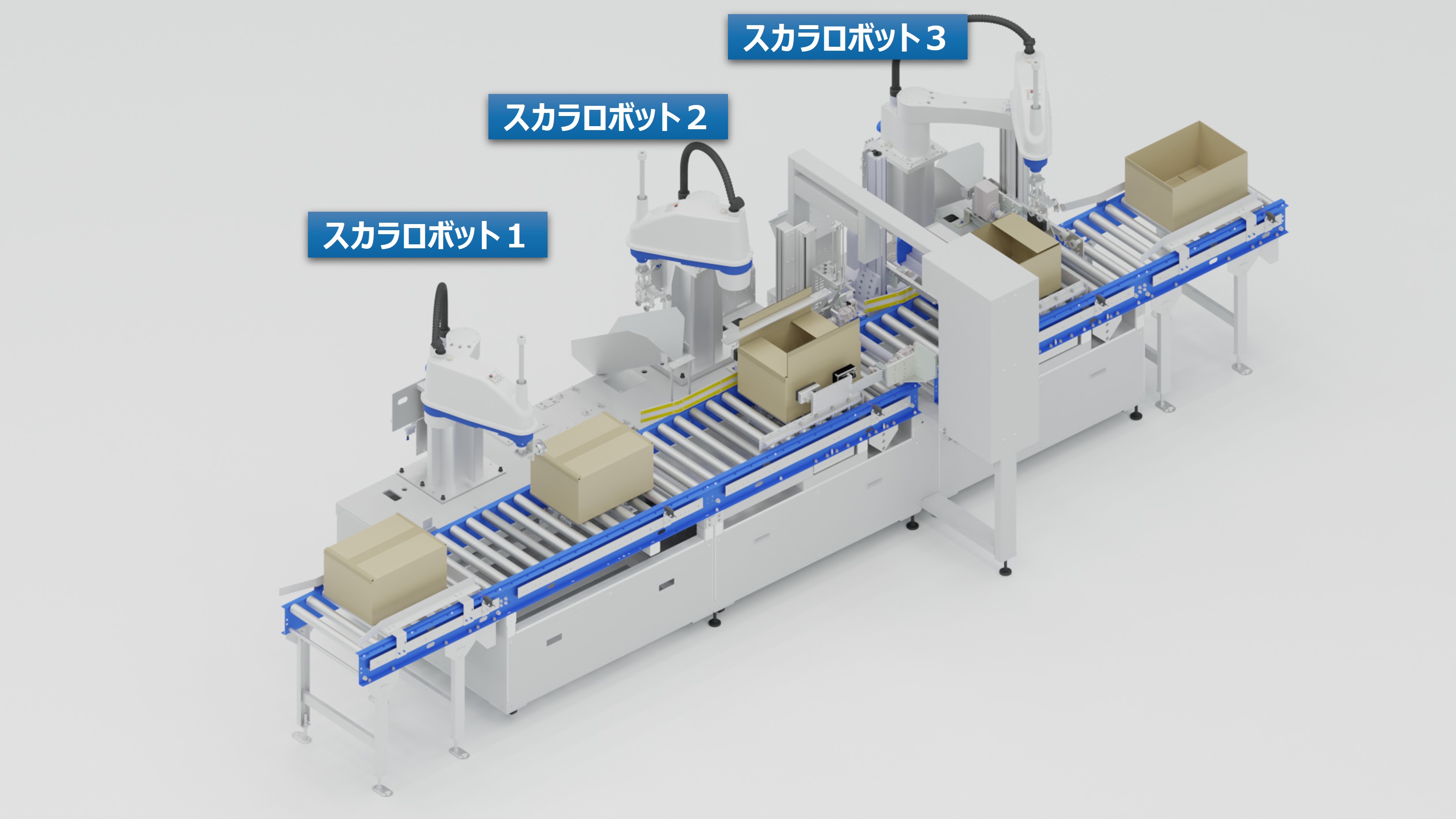
概要
- 様々な段ボールの高速自動開梱が行えます。
- テープカットのため、箱の中身を傷つけずに開梱するのに最適です。
- ケースのサイズを自動検出するため、様々なサイズに対応可能です。
動作フロー
- スカラロボット1にてテープ部分をカット
- 外フラップを直交ロボットで開く
- スカラロボット2で外フラップをカット
- 内フラップも同様に直交ロボットで開き、スカラロボット3で内フラップをカット
検査箱詰め自動化
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
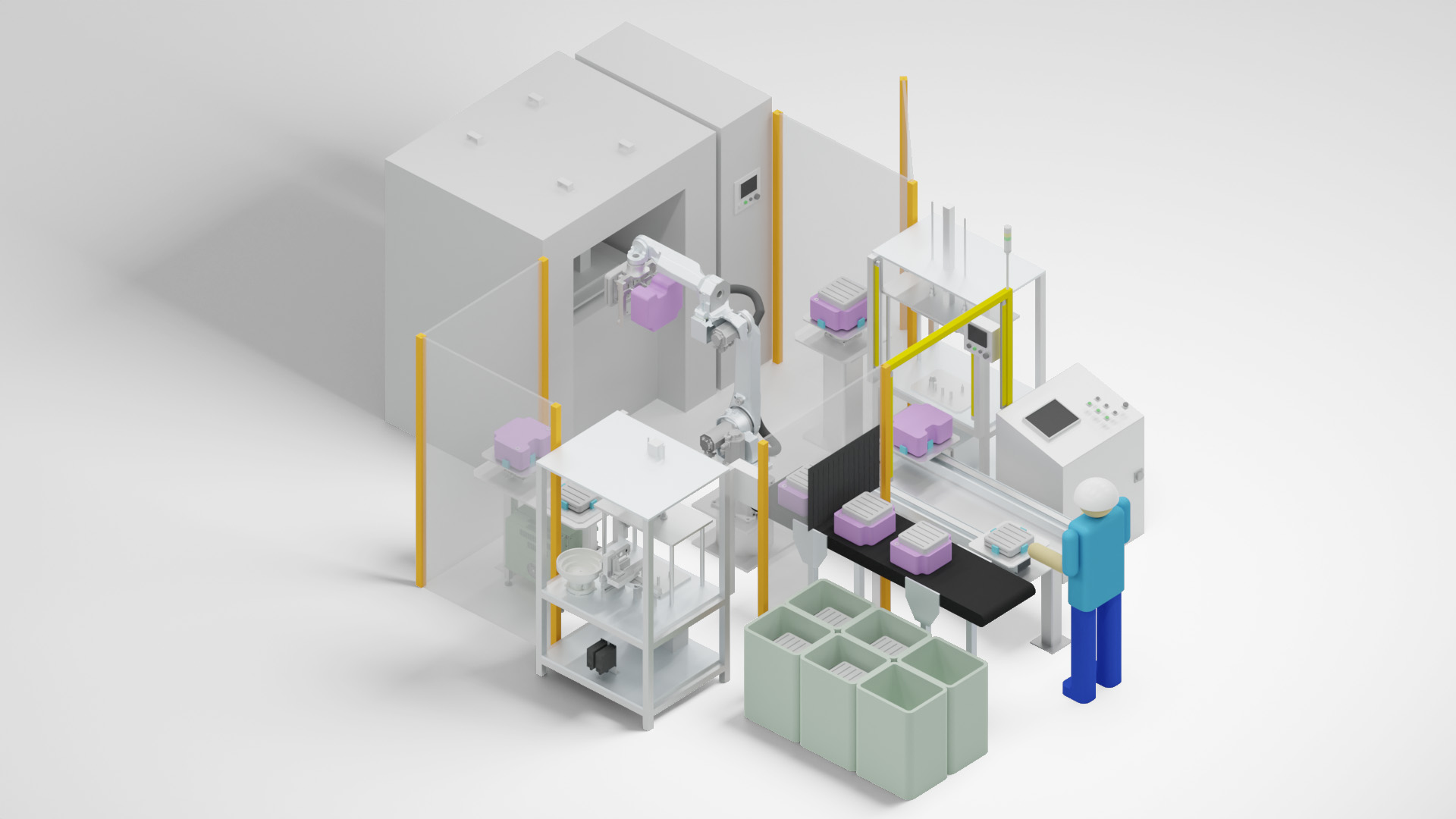
概要
- 成形品の外観検査とトレイ詰めを自動化します。
- 作業者はトレイの回収・補充のみ行います。
動作フロー
- 前工程よりコンベアで流れてきたワークを上面のカメラで検査
- ロボットが料品のみをトレイに整列(NG品は回収箱に搬送)
- 作業者がトレイを回収(補充)
複合材搬送①
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
概要
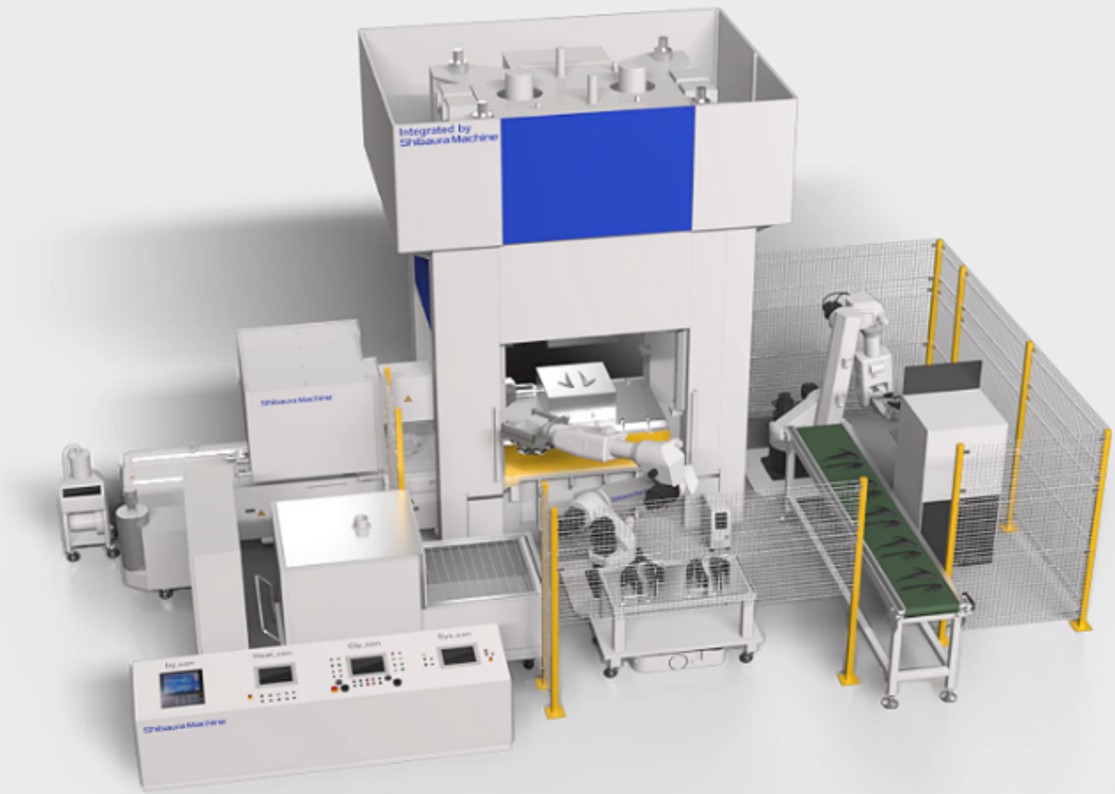
- 加熱装置で加熱したシートを投入ロボットで竪型締装置に投入します。
- 型締め、射出後の製品を取り出しロボットでコンベアに排出します。
- 樹脂との一体成形から製品取り出しまで全自動で行い、優れた品質安定性と高い生産性を実現します。
動作フロー
- 投入ロボットが加熱装置で加熱したシートを把持
- 竪型締装置にシートをセット
- 型締め、射出成形
- 取り出しロボットがコンベアに製品を排出
複合材搬送②
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
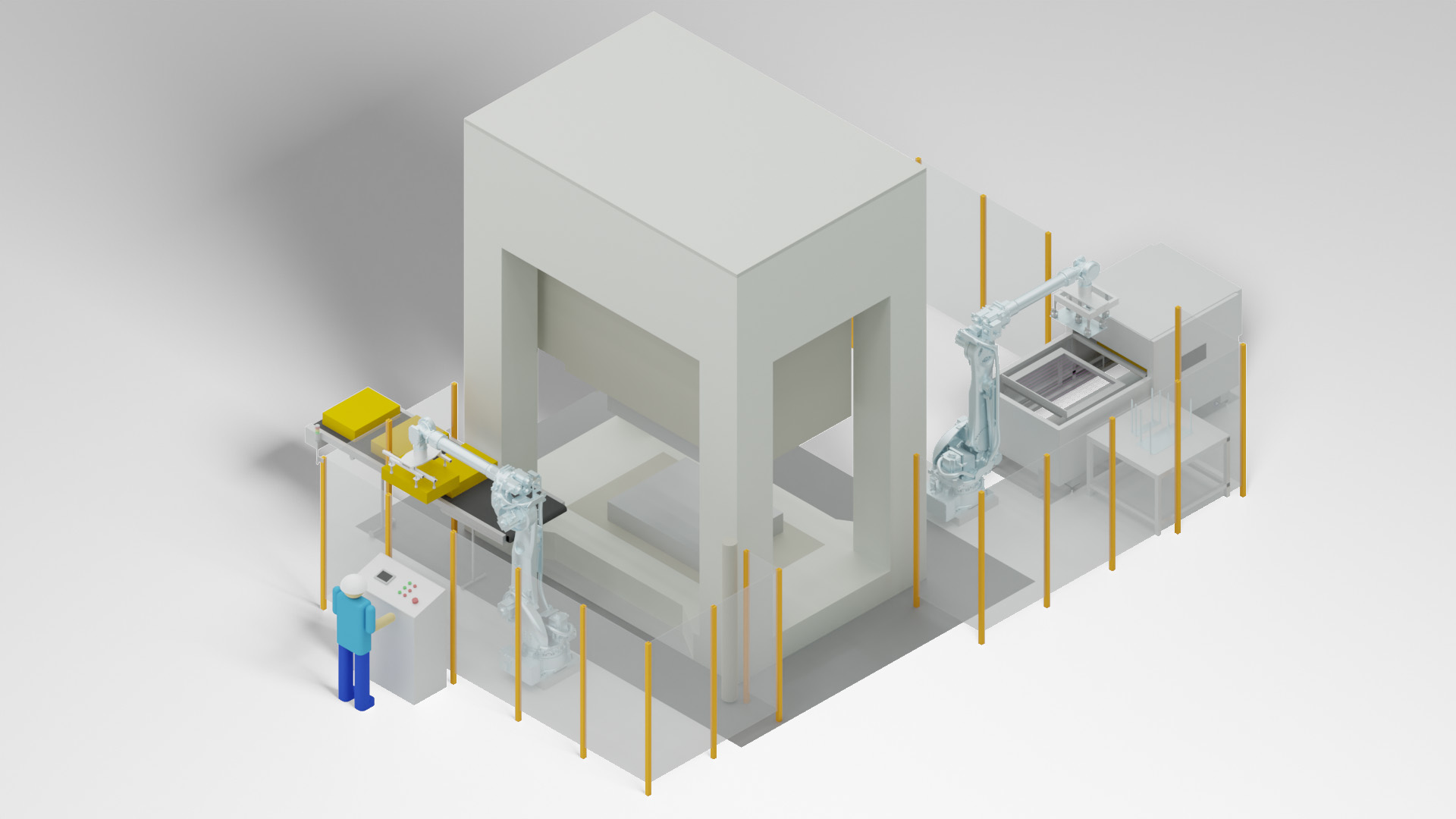
概要
- 加熱装置で加熱したシートを投入ロボットで竪型締装置に投入します。
- プレス成形されたワークを取り出しロボットでコンベアに排出します。
- 樹脂との一体成形から製品取り出しまで全自動で行い、優れた品質安定性と高い生産性を実現します。
動作フロー
- 投入ロボットが加熱装置で加熱したシートを把持
- 竪型締装置にシートをセット
- 型締め、成形
- 取り出しロボットがコンベアに製品を排出
加工機への搬送/取り出し①
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
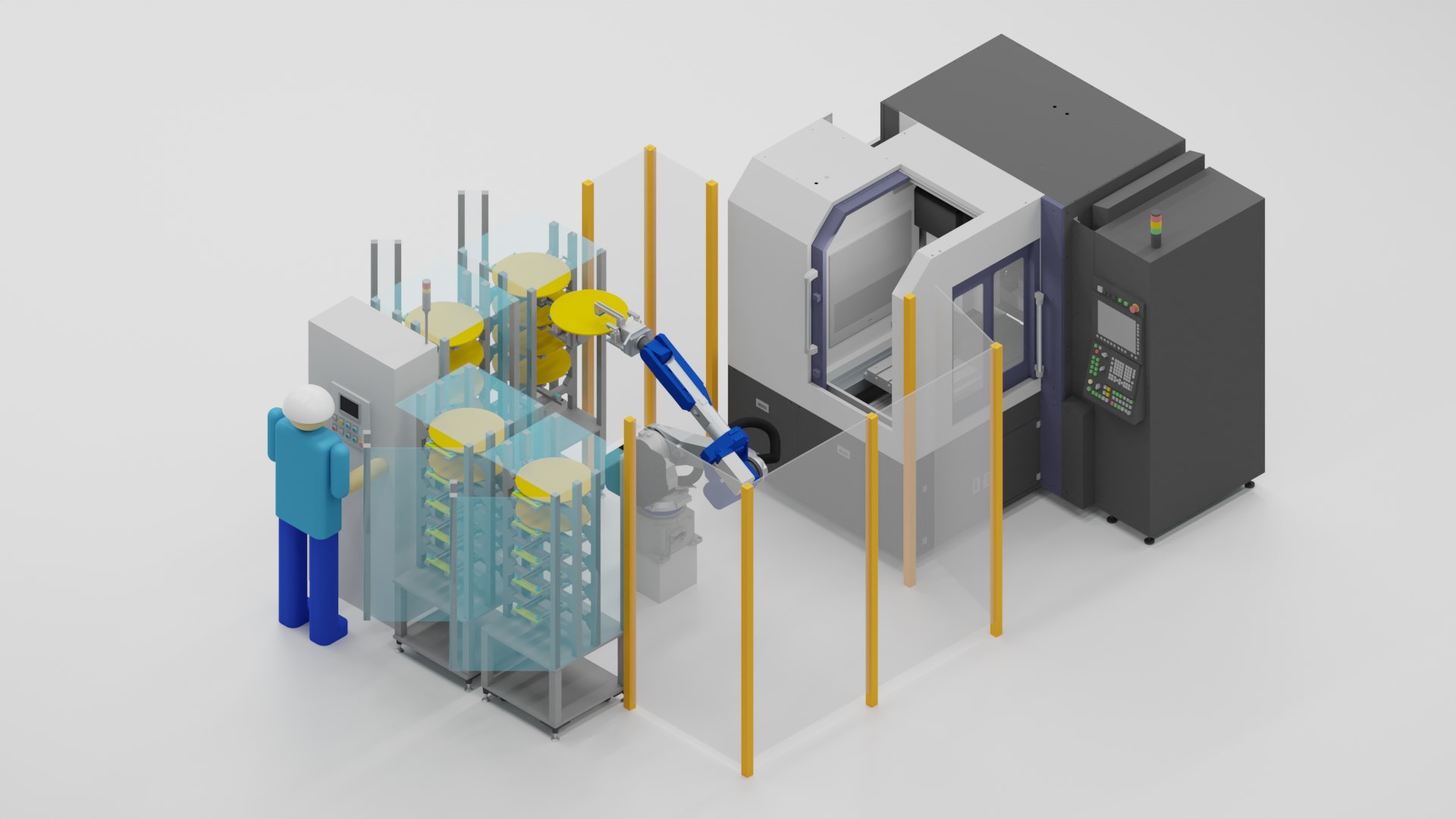
概要
- 加工機へのワーク搬送を自動化します。
- 走行軸を使用すれば複数台の加工機へのワーク搬送も可能です。
動作フロー
- 加工機から加工済みワークを取り出し
- 加工済みワークをストッカーに搬送
- 加工前ワークをストッカーから取り出し
- 加工前ワークを加工機にセット
加工機への搬送/取り出し②
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
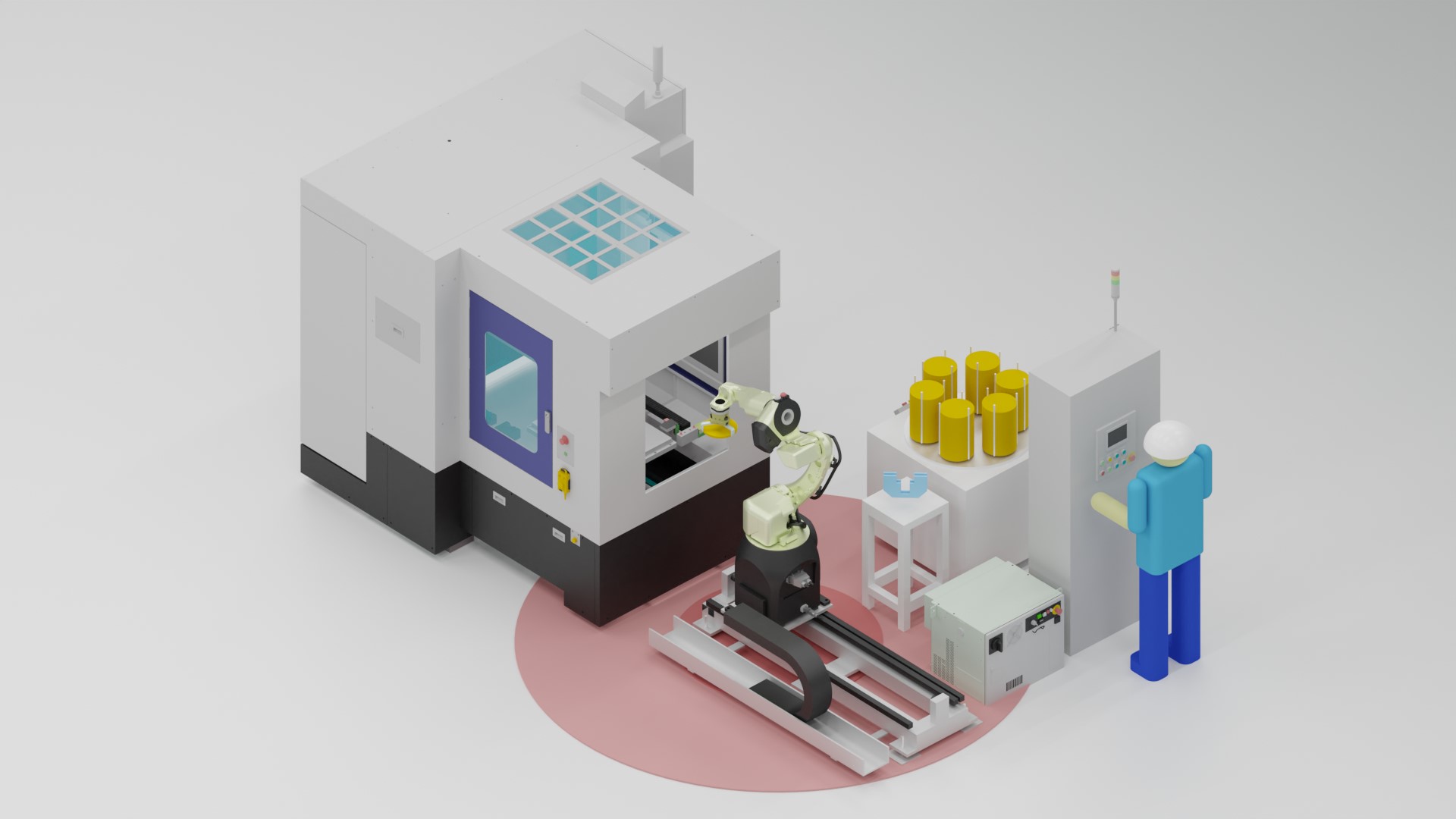
概要
- 加工機へのワーク搬送を自動化します。
- 協働ロボットにより人との共存が可能です。
- 段替え時ロボット退避用のレールを設置し、加工機前のスペースを確保します。
- 仮置き台でワークを反転させ、裏面加工します。
動作フロー
- 加工機から加工済みワークを取り出し
- 加工済みワークをストッカーに搬送
- 加工前ワークをストッカーから取り出し
- 加工前ワークを加工機にセット
加工機への搬送/取り出し③
|
カテゴリ |
|
自動化
|
省人化
|
省スペース
|
ロボット
|
自動機
|
画像認識
|
|
外観検査
|
品質の安定
|
サイクルの安定
|
高速処理
|
危険作業
|
重量物
|
概要
- 加工機へのワーク搬送を自動化します。
- 作業者がセットしたワークの位置や角度のばらつきを測定装置で計測し、ロボットで自動語勢を行い、正確にローディングします。
動作フロー
- 加工機から加工済みワークを取り出し
- 加工済みワークをストッカーに搬送
- 加工前ワークをストッカーから取り出し
- 測定装置で加工前ワークのセット誤差を計測し、多関節ロボットで自動補正
- 加工前ワークを加工機にセット
-
適用事例が無料で確認できる!ダウンロードページはこちら
PAGE TOP